{kind=link}
{kind=link}



.svg)

contact@blackcoffeerobotics.com

14, Raghava Enclave, Transport Road, Secunderabad, Hyderabad (500009)
The robotics community is approaching a significant milestone, the last ROS 1 distribution, reaches its End of Life (EoL) in May 2025. This means the ROS community will cease to provide updates, security patches, and support for ROS 1. For robotics developers and companies heavily invested in ROS 1, now is the crucial time to plan migration to ROS 2.

End of Life for ROS 1 Noetic signifies several important changes:
While several ROS 2 distributions exist, we recommend migrating to ROS 2 Humble Hawksbill. Released in May 2022, it's a Long Term Support (LTS) distribution with support until May 2027. This extended support window provides stability for industrial applications and allows time for proper integration and testing.
These are some direct approaches to transition your ROS 1 stack to ROS 2:
MoveIt2 represents a direct evolution of the popular motion planning framework. Key differences include:

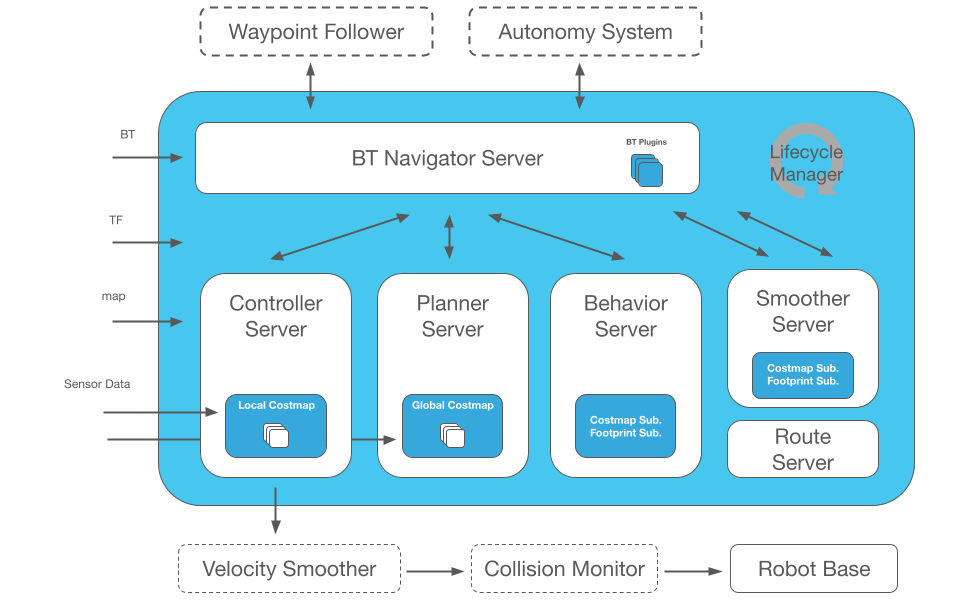
The transition from move_base to Navigation2 (Nav2) represents more than just a framework migration - it's a complete architectural redesign. Nav2 introduces:

Speaking of navigation, our team at Black Coffee Robotics recently contributed Vector Pursuit to the ROS 2 ecosystem - a computationally efficient path-tracking algorithm that outperforms traditional Pure Pursuit while maintaining simplicity in implementation.
While shifting from ROS 1 to ROS 2, developers face these challenges in adapting to the new middleware, updating existing codebases, and managing compatibility with ROS 2's enhanced features and tools.
The ROS 2 launch system represents a significant departure from ROS 1's XML-based approach. While the new Python-based system offers greater flexibility and programmatic control, teams need to invest time in learning the new paradigm. The new system provides better support for conditional execution and parameter handling, but the learning curve can impact initial development velocity.
The simulation ecosystem transition presents several challenges:
For hands-on experience with a robot in different simulators that supports both ROS 1 and ROS 2, explore our in-house robot, BCR Bot , as part of your migration journey.
.jpeg)
Several fundamental changes require careful consideration:
Migration to ROS 2 requires careful planning and expertise. At Black Coffee Robotics, we've successfully helped multiple clients transition their robotics applications from ROS 1 to ROS 2. Our experience spans diverse domains including autonomous mobile robots, robotic arms, and multi-robot systems.
Whether you need consultation on migration strategy or hands-on development support, reach out to us to ensure a smooth transition to ROS 2.

.webp)
contact@blackcoffeerobotics.com
14, Raghava Enclave, Transport Road, Secunderabad, Hyderabad (500009)